אותות מהשריר הדו-ראשי והתלת-ראשי שלכם מורים לרובוט זה כיצד לסייע לכם להרים משאות כבדים >>
דמיינו שאתם מנסים להרים ספה כבדה בעזרת חבר. אתם נמצאים בקצוות המנוגדים, וצריכים לתקשר מתי בדיוק להרים אותה. אפשר לעשות את זה על ידי ספירה עד שלוש, או אולי, אם אתם מסונכרנים מנטלית, בעזרת הנהון של הראש.
בואו נאמר כעת שאתם עושים את אותו הדבר עם רובוט – מהי הדרך הטובה ביותר לומר לו מה לעשות, ומתי? מומחים לרובוטיקה ב-MIT יצרו מערכת מכנית שיכולה לסייע לבני אדם להרים חפצים, והיא פועלת על ידי קריאה ישירה של האותות החשמליים שנוצרים על ידי השריר הדו-ראשי של האדם.
זו גישה ראויה לציון, מכיוון שהשיטה שלהם אינה השיטה הסטנדרטית שבה רוב האנשים יוצרים אינטראקציה עם טכנולוגיה. אנו רגילים לדבר אל עוזרים כמו אלקסה או סירי, להקיש על סמארטפונים או להשתמש בלוח מקשים, עכבר או משטח עקיבה. לחלופין, Google Nest Hub Max, טאבלט חכם לבית שמצויד במצלמה, יכול לשים לב למחוות יד שמציינת "עצור" שהמשתמש עושה כאשר ברצונו לעשות משהו כמו להשהות סרטון וידאו. בינתיים, מכוניות רובוטיות – רכבים אוטונומיים – קולטים את סביבתם באמצעות מכשירים כמו לייזר, מצלמות ויחידות מכ"מ.
אולם אף אחת ממערכות רובוטיות אלו אינה מודדת את תנועת הכיפוף של שריש אנושי, כמו שעושה רובוט זה. ובמצבים שבהם אדם מרים חפץ, רובוט שמקשיב לפקודות קוליות או משתמש במצלמות עשוי שלא להיות הגישה הטובה ביותר על מנת לדעת מתי בדיוק להרים ולאיזה גובה.
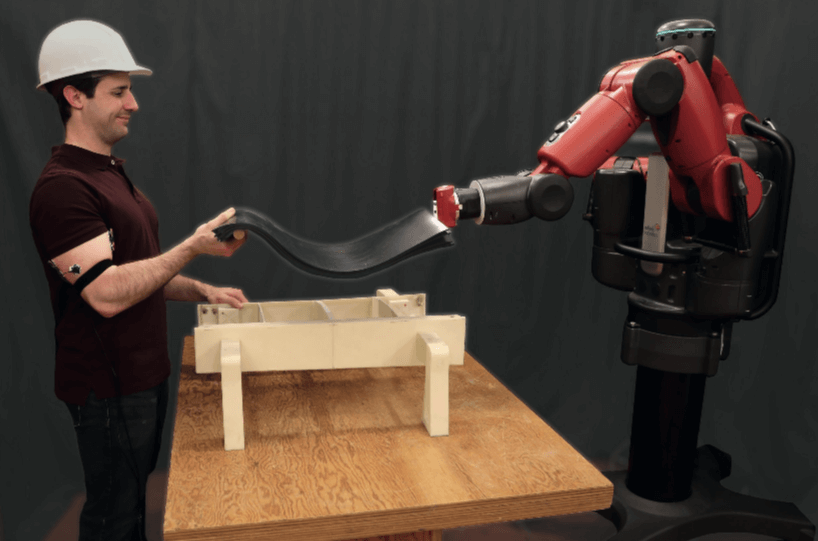
הרובוט עם חישת השריר הדו-ראשי פועל באמצעות אלקטרודות שמוחדרות, אבל ממש מוחדרות, לזרוע העליונה של אדם ומחוברות בחוטים לרובוט. "באופן כללי, המערכת נועדה להקל על אנשים ורובוטים לעבוד יחד כצוות על משימות פיזיות," אומר ג'וזף דל-פּרטוֹ (Joseph DelPreto), דוקטורנט ב-MIT, שחוקר אינטראקציה בין אדם לרובוט, והמחבר הראשון של מסמך המתאר את המערכת. בדרך כלל, כדי לעבוד יחד כהלכה, דרושה תקשורת טובה, ובמקרה זה, תקשורת זו צומחת ישירות מהשרירים שלך.
"כשאתה מרים משהו עם הרובוט, הוא יכול לבדוק את פעילות השרירים שלך ולקבל מושג כיצד אתה נע, ואז יכול לנסות לעזור לך."
הרובוט מגיב לאותות השרירים בשתי דרכים בסיסיות. הדרך הפשוטה ביותר, ברגע שמזיזים את הזרוע מעלה או מטה, הרובוט חש באותות – שנקראים אותות EMG – מהשריר הדו-ראשי, ולאחר מכן משקף או מחקה את התנועות. אפשר גם להניע את השריר הדו-ראשי מבלי להזיז את הזרוע בפועל – על ידי כיווץ או שחרור של השריר – כדי להורות ליד הרובוט לנוע מעלה או מטה.

המערכת גם מפרשת תנועות עדינות יותר, דבר שבאפשרותה לבצע תודות לבינה מלאכותית. כדי להורות לזרוע להתרומם מעלה או לרדת מטה בדרך מעודנת ומדויקת יותר, האדם עם האלקטרודות בזרועו יכול להזיז את פרק כף היד מעט מעלה פעמיים, או מטה פעם אחת, והרובוט יעשה כמצוותו. כדי להשיג זאת, דל-פרטו השתמש ברשת נוירונים, מערכת בינה מלאכותית שלומדת מנתונים. רשת הנוירונים מפרשת את אותות ה-EMG שמגיעים מהשריר הדו-ראשי והתלת-ראשי של האדם, מנתחת את מה שהיא רואה כ-80 פעמים בשנייה, ולאחר מכן מורה לזרוע הרובוט מה לעשות.
קל מאוד לראות כיצד מערכת כמו זו יכולה לעזור למישהו שהוטלה עליו עבודה גופנית, ומחקר זה מומן חלקית על ידי חברת בואינג.
"אנו יכולים לדמיין שימוש בזה במפעלים או באתרי בנייה שבהם יש צורך להרים חפצים גדולים או כבדים בצוותים," אומר דל-פרטו.
רובוטים כבר משולבים היום במפעלים, כמובן. לדוגמה, בבית יציקה של ג'נרל מוטורס במישיגן, נעשה שימוש במערכות רובוטיות כדי לסייע בעבודות כבדות ו/או מסוכנות, כגון החזקת התבנית של בלוק מנוע בזמן שאלומיניום נוזלי לוהט זורם לתוכה. זו עבודה שאדם לא יכול לעשות, וגם לא כדאי שיעשה. אבל המערכת של MIT תאפשר קשר ישיר יותר, ואולי גם אינטואיטיבי יותר, בין בני אדם ומכונות, כאשר הם עושים משהו כמו להרים חפץ יחד. אחרי הכל, בני אדם ורובוטים מצטיינים בסוגים שונים של משימות.
"ככל שנוכל לגרום לכך שהאדם והרובוט יעבדו קרוב ומדויק יותר ביחד, כך סינרגיה זו תוכל להיות יעילה יותר," אומר דל-פרטו.

